

About
I am a research associate in the Electrical and Computer Engineering Department at the University of Toronto, Canada.
My research interests include Fleet Management and Multi-Agent Path Planning for Autonomous Robots, Sequential Decision-Making, Reinforcement Learning, and Optimization Theory.
News
[Jul. 2022] Our paper "Dynamic Resource Management for Providing QoS in Drone Delivery Systems" is accepted to IEEE International Conference on Intelligent Transportation (ITSC 2022).
[Jan. 2022] Our paper "Reinforcement Learning-aided Safe Planning for Aerial Robots to Collect Data in Dynamic Environments" is accepted to IEEE Internet of Things Journal.
[Jun. 2021] Our paper "Distributed Deep Reinforcement Learning for Intelligent Traffic Monitoring with a Network of Aerial Robots" is accepted to IEEE International Conference on Intelligent Transportation (ITSC 2021).
[Dec. 2020] Our paper "Trajectory Design for the Aerial Base Stations to Improve Cellular Network Performance" is accepted to IEEE Transactions on Vehicular Technology.
[Aug. 2020] Our paper "Federated Learning for Cellular-connected UAVs: Radio Mapping and Path Planning" is accepted to IEEE GLOBECOM 2020.
[Jul. 2020] Our paper "No Cross-Validation Required: An Analytical Framework for Regularized Mixed-Integer Problems" is accepted to IEEE Communication Letters.
[Jan. 2020] Our paper "A Double Q-Learning Approach for Navigation of Aerial Vehicles with Connectivity Constraint" is accepted to IEEE ICC 2020.
Selected Research
Path Planning and Fleet Management for UAVs
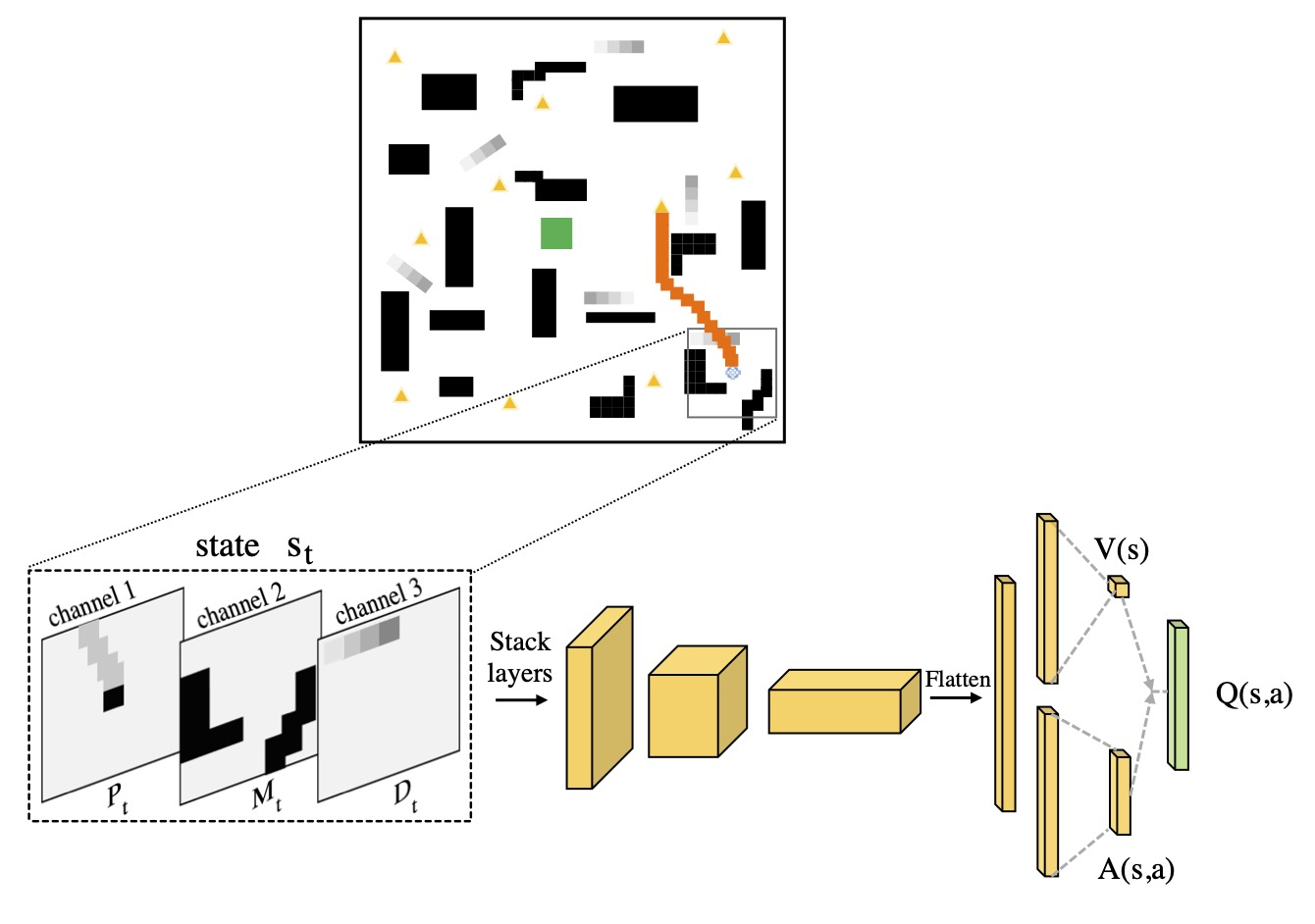
Reinforcement Learning-aided Safe Planning for Aerial Robots to Collect Data in Dynamic Environments
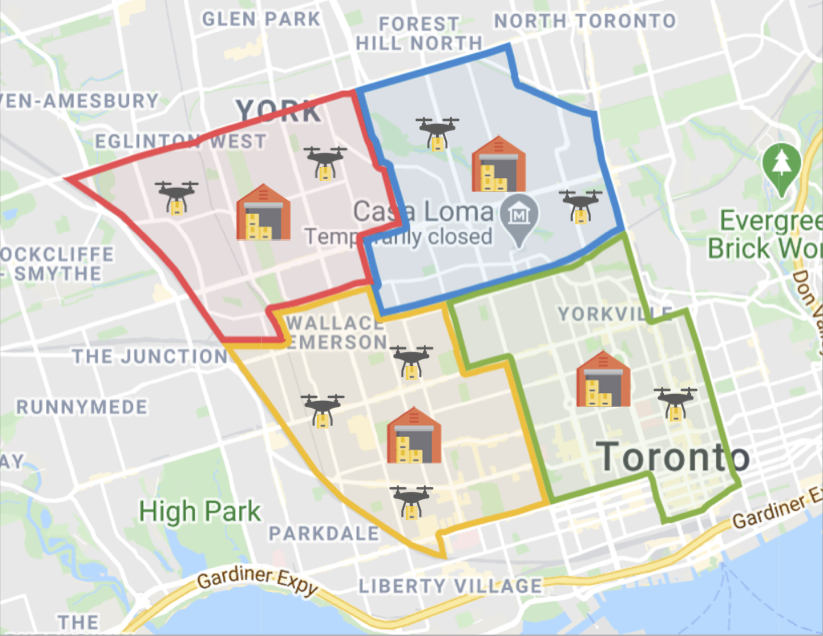
Dynamic Resource Management for Providing QoS in Drone Delivery Systems
Drones have been considered as an alternative means of package delivery to reduce the delivery cost and time. Due to the battery limitations, the drones are best suited for last-mile delivery, i.e., the delivery from the package distribution centers (PDCs) to the customers. Since a typical delivery system consists of multiple PDCs, each having random and time-varying demands, the dynamic drone-to-PDC allocation would be of great importance in meeting the demand in an efficient manner. In this paper, we study the dynamic UAV assignment problem for a drone delivery system with the goal of providing measurable Quality of Service (QoS) guarantees.
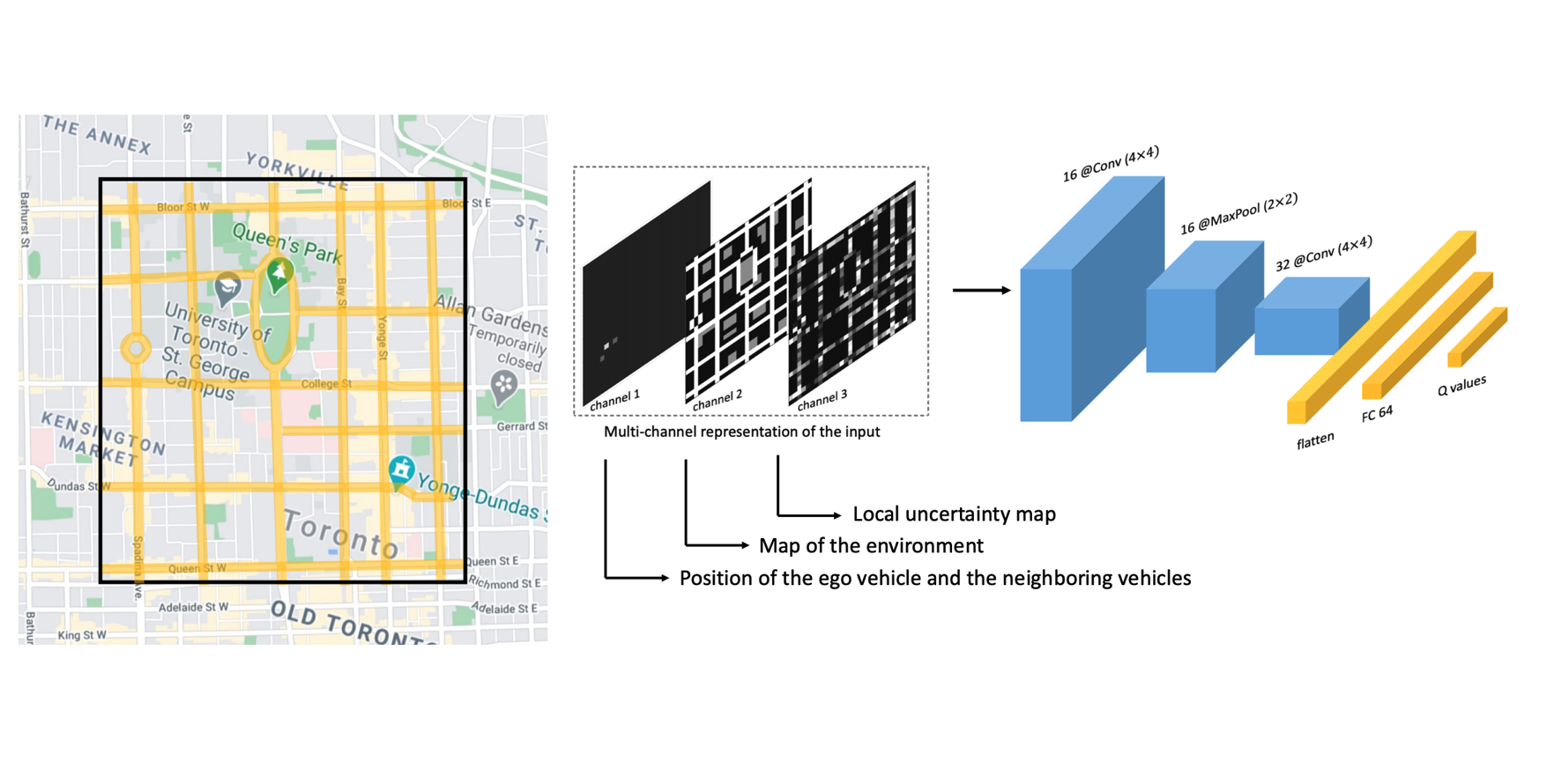
Distributed Deep Reinforcement Learning for Intelligent Traffic Monitoring with a Network of Aerial Robots
UAV-assisted traffic monitoring in urban areas is an emerging application that can play a key role in intelligent transportation systems. We study the traffic monitoring problem in a road network using a team of aerial robots. To address the stochastic and time-varying nature of the traffic events, we define an uncertainty metric for each location of the road network and formulate a path planning problem for the aerial robots to minimize the network's average uncertainty. We express this problem as a partially observable Markov decision process (POMDP) and propose a distributed and scalable algorithm based on deep reinforcement learning to solve it. We evaluate the performance of our proposed algorithm in both scenarios for a real road network topology and demonstrate its functionality in a traffic monitoring system.
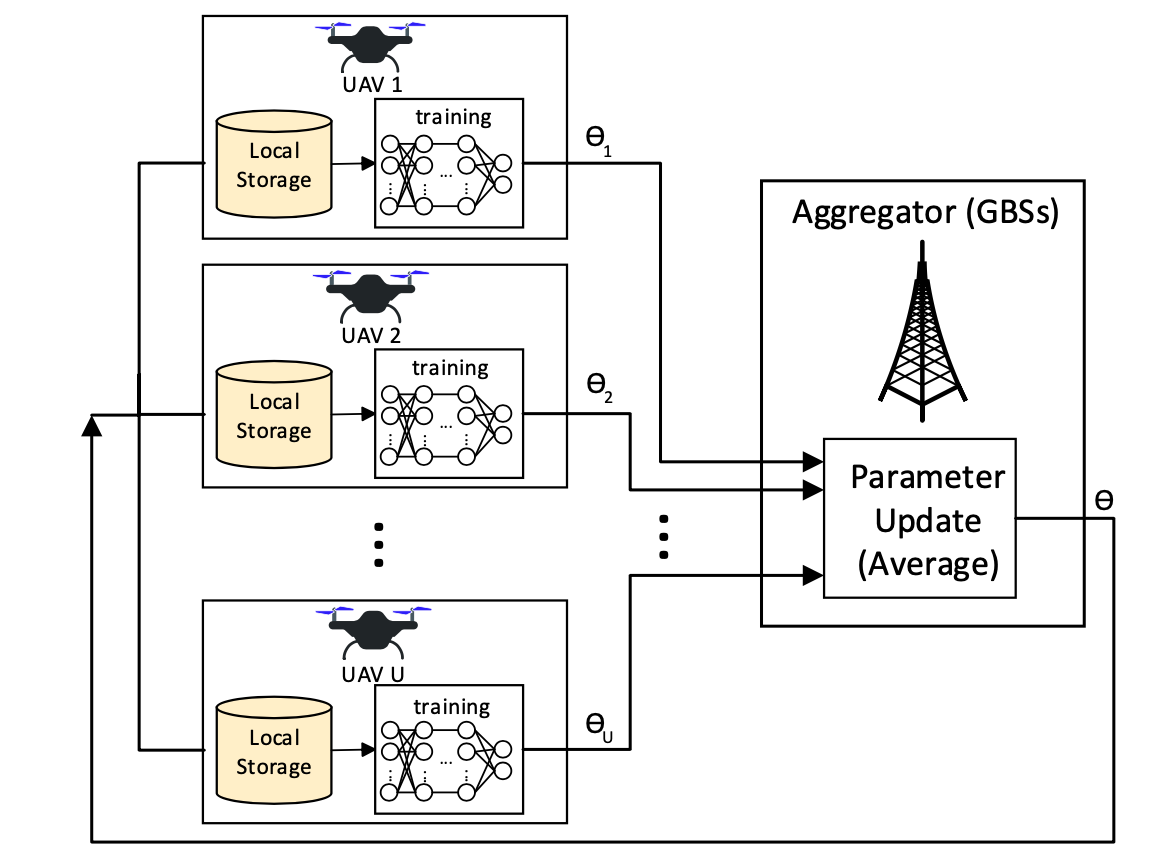
Federated Learning for Cellular-connected UAVs: Radio Mapping and Path Planning
In many applications such as monitoring and transportation, the drones need to maintain a reliable Internet connection during their flights. This is essential to support the command and data flows between the UAVs and the application's servers. We study the UAV path planning under connectivity constraints for a multi-UAV system. As the network's connectivity model depends on its topology, the corresponding path planning problem is non-convex and challenging to solve. We reformulate the problem to convert it to a mathematically more tractable form. To solve the reformulated problem, we propose a two-step algorithm. In the first step, by using a distributed optimization technique, called Federated Learning (FL), the UAVs collaboratively build a global model of the coverage (outage) probability in the environment. In this method, each UAV uses its data to update the global model locally. Accordingly, the UAVs do not need to share their collected information with a centralized node to execute the training task. Hence, the training process is executed in a distributed manner. In the second step, we use the resulting global model to design the paths of the UAVs. To achieve this goal, we propose a path planning algorithm based on rapidly-exploring random trees, which is a sampling-based path planning algorithm. Our algorithm guarantees that the connectivity requirement of the UAVs is satisfied during their flight.
Optimization Theory
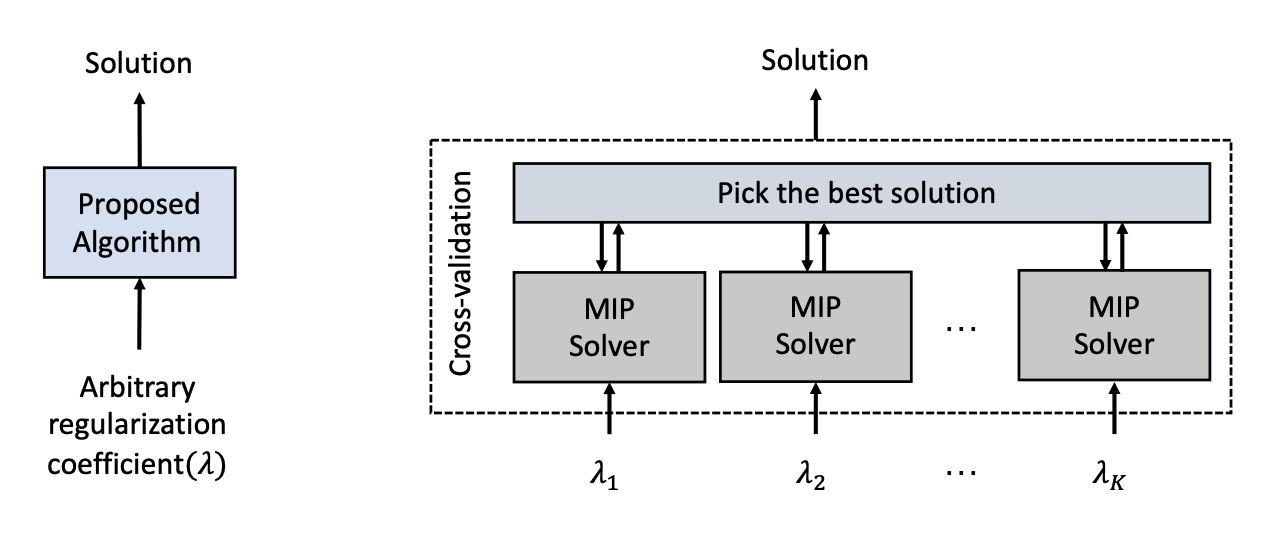
No Cross-Validation Required: An Analytical Framework for Regularized Mixed-Integer Problems
We develop a method to obtain the optimal value for the regularization coefficient in a general mixed-integer problem (MIP). This approach eliminates the cross-validation performed in the existing penalty techniques to obtain a proper value for the regularization coefficient. We obtain this goal by proposing an alternating method to solve MIPs. First, via regularization, we convert the MIP into a more mathematically tractable form. Then, we develop an iterative algorithm to update the solution along with the regularization (penalty) coefficient. We show that our update procedure guarantees the convergence of the algorithm. Moreover, assuming the objective function is continuously differentiable, we derive the convergence rate, a lower bound on the value of regularization coefficient, and an upper bound on the number of iterations required for the convergence.
Publications
Journal Publications
• Reinforcement Learning-aided Safe Planning for Aerial Robots to Collect Data in Dynamic EnvironmentsB. Khamidehi and E. S. Sousa
IEEE Internet of Things Journal (2022)
• Trajectory Design for the Aerial Base Stations to Improve Cellular Network PerformanceB. Khamidehi and E. S. Sousa
IEEE Transactions on Vehicular Technology (2021)
• No Cross-Validation Required: An Analytical Framework for Regularized Mixed-Integer ProblemsB. Soleimani, B. Khamidehi, and M. Sabbaghian
IEEE Communication Letters (2020) [Extended Version]
• Resource Allocation for SC-FDMA Femtocell NetworksB. Khamidehi and M. Sabbaghian
IEEE Transactions on Vehicular Technology (2017)
• Joint Sub-Channel Assignment and Power Allocation in Heterogeneous Networks: An Efficient Optimization MethodB. Khamidehi, A. Rahmati, and M. Sabbaghian
IEEE Communication Letters (2016)
Refereed Conference Proceedings
• Dynamic Resource Management for Providing QoS in Drone Delivery SystemsB. Khamidehi and E. S. Sousa
IEEE ITSC (2022)
• Distributed Deep Reinforcement Learning for Intelligent Traffic Monitoring with a Network of Aerial RobotsB. Khamidehi and E. S. Sousa
IEEE ITSC (2021)
• Federated Learning for Cellular-connected UAVs: Radio Mapping and Path PlanningB. Khamidehi and E. S. Sousa
IEEE GLOBECOM (2020)
• A Double Q-Learning Approach for Navigation of Aerial Vehicles with Connectivity ConstraintB. Khamidehi and E. S. Sousa
IEEE ICC (2020)
• Reinforcement Learning-Based Trajectory Design for the Aerial Base StationsB. Khamidehi and E. S. Sousa
IEEE PIMRC (2019)
• Power Efficient Trajectory Optimization for the Cellular-Connected Aerial VehiclesB. Khamidehi and E. S. Sousa
IEEE PIMRC (2019)
• Green Cloud Computing for Multi Cell NetworksM Masoudi, B. Khamidehi, and C. Cavdar
IEEE WCNC (2017)
• Power allocation in uplink LTE femtocells with zero forcing frequency domain equalizerB. Khamidehi, M. Sabbaghian, and H. Saeedi
IEEE WCNC (2016)
Contact
Bahen Centre for Information Technology,40 St George St, Toronto,
ON M5S 2E4
Email: [b . Last_Name]@utoronto.ca
